Automatic Tuning
Researchers: Karl Johan Åström, Tore Hägglund, Jonas Hansson, and Kristian Soltesz.
Methods for automatic tuning of PID controllers were developed in the early eighties, and implemented in industrial single-station controllers and DCS systems. A main reason was the technology shift from analog to computer-based controllers and systems at that time, which made implementation of such tuning functions possible. These methods were limited by the computer power and the knowledge about PID design that were available at that time. Since then, the computational power and the knowledge about PID design has increased, which provides the possibility to develop new tuning functions with better performance.
Within process industry, a large number of processes can be accurately modeled using simple models, i.e. SISO FOTD or SOTD, and there are efficent tuning rules for PID controllers that are based on these model structures.
We aim at developing a methodology for automatic tuning of PID controllers, using nonlinear feedback for idenfication input generation and optimization based methods for both process parameter identification and controller synthesis.
The main components of the auto-tuning algorithm are the following:
- Generate identification input with little or none a priori system information
- Transfer function parameter identification through optimization
- Model verification
- PID synthesis
- Performance evaluation
As a case study, a modified version of the method has been applied in closed-loop controlled anesthesia. The closed-loop anesthesia project is described here.
Developed autotuners
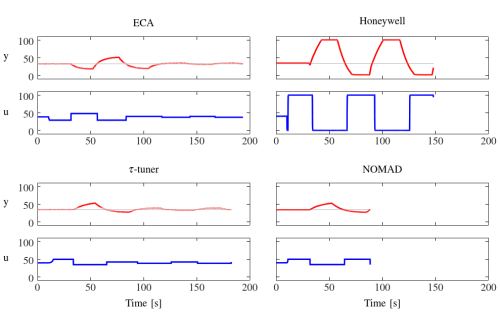
In the PhD Thesis by J. Berner, three different versions of the autotuner are developed and described.
One version is called the Tau-tuner and conducts a simple experiment, using an asymmetric relay function as feedback. From the experiment the static gain and the normalized time delay of the system can be estimated, and from this a FOTD model can be achieved from analytical formulas. From the achieved model the parameters of a PI or PID controller is tuned by existing tuning rules.
The second version is called the NOMAD-tuner and it uses a similar but even shorter experiment, and then uses the experiment data to find a first or second order model with time delay using numerical parameter estimation methods. The PID controller parameters are then obtained by optimization methods. This version requires more calculations, but is more robust to disturbances, gives more accurate models and can be started without waiting for steady-state.
The third version is called the multi-NOMAD and is an extension of the NOMAD autotuner to multivariable (two-input two-output) systems.
All versions have been evaluated in simulations and on physical processes. The Tau-tuner has also been tried on an industrial air handling unit. Matlab/Simulink implementations of all three autotuners are available in this git-repo, and the Tau-tuner has also been implemented and tested in Modelica (link to MSc thesis) and JGrafchart (link to paper).
Two master thesis projects have been performed in collaboration with ABB, where versions of the NOMAD autoutuner has been developed and implemented in one of their control systems. The implementation has been tested both in simulations and on laboratory processes.
Publications
Lundh, M., Theorin, A., Hägglund, T., Hansson, J., Svensson, M., Åström, K. J. & Soltesz, K., "Model optimization for autotuners in industrial control systems". Proceedings of the 26th International Conference on Emerging Technologies and Factory Automation (ETFA). 2021.
Hansson, J., Svensson, M., Theorin, A., Tegling, E., Soltesz, K., Hägglund, T. & Åström, K. J., "Next generation relay autotuners - analysis and implementation". Proceedings of the 5th IEEE Conference on Control Technologies and Applications (CCTA), 2021.
Magnus Lundh: A new, fast, and efficent automatic tuner for the ABB AC 800M family of controllers, Master Thesis, Department of Automatic Control, Lund University, TFRT-6146, 2021.
Jonas Hansson, Magnus Svensson: Next Generation Relay Autotuners – Analysis and Implementation at ABB, Master Thesis, Department of Automatic Control, Lund University, TFRT-6107, 2020.
Josefin Berner, Kristian Soltesz, Tore Hägglund, Karl Johan Åström: "An experimental comparison of PID autotuners". Control Engineering Practice, 73, pp. 124–133, 2018.
Josefin Berner: Automatic Controller Tuning using Relay-based Model Identification. PhD Thesis Department of Automatic Control, Lund University, Sweden, October 2017.
Josefin Berner, Kristian Soltesz: "Short and Robust Experiments in Relay Autotuners". In 22nd IEEE International Conference on Emerging Technologies and Factory Automation; ETFA2017, 2017.
Josefin Berner, Kristian Soltesz, Karl Johan Åström, Tore Hägglund: "Practical Evaluation of a Novel Multivariable Relay Autotuner with Short and Efficient Excitation". In IEEE Conference on Control Technology and Applications, CCTA 2017, 2017.
Josefin Berner, Kristian Soltesz, Tore Hägglund, Karl Johan Åström: "Autotuner identification of TITO systems using a single relay feedback experiment". IFAC-PapersOnLine, 50:1, pp. 6619–6623, 2017.
Kristian Soltesz, Pedro Mercader, Alfonso Baños: "An automatic tuner with short experiment and probabilistic plant parameterization". Int. Journal of Robust and Nonlinear Control, 27:11, pp. 1857–1873, 2017.
Pedro Mercader, Kristian Soltesz, Alfonso Baños: "Autotuning of an In-Line pH Control System". In 21st IEEE International Conference on Emerging Technologies and Factory Automation, ETFA 2016, 2016.
Kristian Soltesz, Pedro Mercader: "Identification for Control of Biomedical Systems using a very Short Experiment". In 2016 International Conference on Systems in Medicine and Biology, 2016.
Alfred Theorin, Josefin Berner: "Implementation of an Asymmetric Relay Autotuner in a Sequential Control Language". In IEEE International Conference on Automation Science and Engineering (IEEE CASE 2015), 2015.
Josefin Berner: "Automatic Tuning of PID Controllers based on Asymmetric Relay Feedback". Licentiate Thesis Department of Automatic Control, Lund University, Sweden, June 2015.
Josefin Berner, Karl Johan Åström, Tore Hägglund: "Towards a New Generation of Relay Autotuners". In 19th IFAC World Congress, 2014, 2014.
Kristian Soltesz: "On Automation of the PID Tuning Procedure". Licentiate Thesis Department of Automatic Control, Lund University, Sweden, January 2012.
Kristian Soltesz, Tore Hägglund: "Extending the Relay Feedback Experiment". IFAC Proceedings Volumes, 44:1, pp. 13173–13178, 2011.
Kristian Soltesz, Tore Hägglund, Karl Johan Åström: "Transfer Function Parameter Identification by Modified Relay Feedback". In American Control Conference, 2010, 2010.