Decentralized Control Structures for Process Control
Researchers:Tore Hägglund
This project aims to revise, improve, and develop new, basic control structures for decentralized control used in the regulatory control layer in process control. However, the ideas to be investigated in this project are relevant in other application areas as well.
Low-order Feedforward Controllers
Feedforward is a powerful method to improve the performance of feedback loops. Feedforward can be made both from setpoint and measurable load disturbances. In this project, the goal is to improve both structures and design methods for feedforward control from load disturbances.
The basic idea for design of feedforward compensators is simple. The ideal compensator is formed as the dynamics between the load disturbance and the process output, divided by the dynamics between the control signal and the process output, with reversed sign. However this ideal compensator is seldom realizable. Therefore, there is a need for design methods for feedforward controllers.
In a first phase, new simple tuning rules for feedforward compensators have been derived. The design objective is to minimize IAE without getting any overshoot in step load disturbance responses. This work has been done in collaboration with University of Almeria. This collaboration continues, and University of Brescia has also been involved in the project where e.g. performance indices for feedforward control have been developed.
Using a structure that decouples feedback and feedforward action, optimal design rules that minimizes ISE have been developed. The used structure simplifies tuning of the feedforward controller by allowing the controller to be tuned with respect to the open-loop system while maintaining its properties and performance when used in a closed-loop setting. The structure also enables independent re-tuning of both the feedback and the feedforward controller. Work has also been done concerning characterization of optimal low-order feedforward controllers and practical considerations for implementation.
PID controllers are often implemented with set-point weighting to improve the response to changes in the reference. By using convex optimization techniques the parameters for the set-point weights can be found efficiently, fast as well as be guaranteed to be globally optimal. By solving an optimization problem to find the optimal set-point weights for a large batch of processes, tuning rules have been found that minimizes IAE. The same optimization framework and formulations can also been used to tune feedforward controllers from measurable disturbances.
Ratio Control
In ratio control, the control objective is to keep the ratio between two signals, normally flow measurements, at a desired value in spite of variations in the setpoints, load disturbances, and possible control signal saturations. It is also desirable to keep the ratio also in situations when one of the controllers is switched to local setpoint or manual control. Ratio control is a very common problem in process control. It is estimated that about 15% of all controllers in a process control plant are used for ratio control. The industry standard today is to use either a parallell ratio station or a series ration station. These methods can only handle a few of the disturbances mentioned above.
In the project we have derived a new method, the Tracking Ratio Station, that handles all disturbances. The basic idea is to switch the master and slave roles between the two lops depending on the magnutudes of the control errors in the loops. The method has been field tested in a paper mill and is able to track the ratio during setpoint changes, load disturbances in both loops, saturations in both loops, and also the situation when one of the controllers is switched to local setpoint or manual control.

A project where the goal is to combine the Tracking Ratio Station with feedforward control from the flow setpoint to obtain efficient control during flow setpoint variations has been performed together with the University of Brescia.
Feedforward Mid-Ranging Control
Mid-ranging control is a control strategy that is used when there are more than one manipulated variable available to control a process variable. Mid-ranging control handles the redundancy by coordinating the roles of the different manipulated variables. The most common approach is to introduce valve position controllers (VPC) that control the steady-state position of manipulated variables.There are, unfortunately, some severe drawbacks with the VPC approach that makes it unsuitable for many industrial applications.
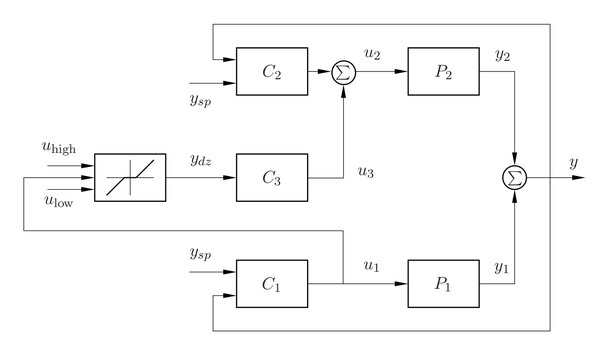
In this project a new approach to mid-ranging control is investigated. The new strategy uses feedforward control to obtain desired steady-state values of the manipulated variables. The approach avoids the drawbacks associated with the VPC approach. The project is sponsored by PiiA-Vinnova and is performed in collaboration with ABB.
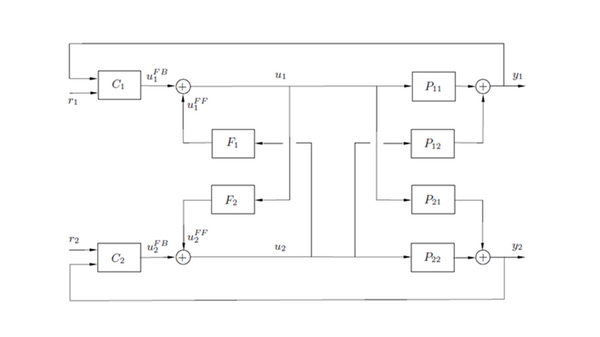
Simple and efficient control loop decoupler for process control applications
In this project, a control loop decoupler suitable for process control applications has been developed and implented in an industrial control system. A prerequisite was that the two SISO controllers should be retained, and that the decoupling should be obtained by connecting a decoupling block to the two controllers. The decoupling is based on the inverted decoupling technique. It has been shown that inverted decoupling using just static gains in the feedforward elements provides a significant reduction of the coupling. It has also been shown that gains obtained by just considering static relations give decouplings that often are similar to those obtained using optimal feedforward gains.
This project is performed in collaboration with ABB, and the control loop decoupler has been implemented in the ABB controller family AC 800M. Automatic tuning procedures are also developed so that the feedforward gains of the decoupler can be determined automatically.
Publications
Caparroz, K. Soltesz, T. Hägglund, J. Guzmán, M. Berenguel. "A new approach to relay-based autotuning PID controllers and their evaluation in pH control of industrial photobioreactors.” Control Engineering Practice, 164, 2025.
F. Norlund, T. Hägglund, and K. Soltesz. "Seamless PID-MPC hybrid control". IFAC Conference on Advances in PID Control. Almeria, Spain 2024.
J. Guzman and T. Hägglund. "Give us PID controllers and we can control the world". IFAC Conference on Advances in PID Control. Almeria, Spain 2024.
F. García-Mañas, T. Hägglund, J. Guzmán, F. Rodríguez, and M. Berenguel. "A practical solution for multivariable control of temperature and humidity in greenhouses.” European Journal of Control, 77, May 2024.
Á. Hoyo, J. Guzmán, J. Moreno, and T. Hägglund. “Double feedforward compensation for cascade control schemes.” Computers and Chemical Engineering, 181, February 2024.
J. Guzman and T. Hägglund. Feedforward Control: Analysis, Design, Tuning, and Implementation. De Gruyter Textbook. De Gruyter, Germany, July 2024.
Guzmán and T. Hägglund. “Tuning rules for feedforward control from measurable disturbances combined with PID control: a review.” International Journal of Control, 97:1, pp. 2–15, 2024.
Á. Hoyo, T. Hägglund, J. Guzmán, and J. Moreno. “A practical solution to the saturation problem in feedforward control for measurable disturbances.” Control Engineering Practice, 139, October, October 2023.
J. Guzman and T. Hägglund. “Selecting control schemes and tuning rules in feedforward control.” IFAC-PapersOnLine, 56:2, pp. 3253–3258, 2023. 22nd IFAC World Congress, 2023.
F. García-Mañas, T. Hägglund, J. Guzmán, F. Rodríguez, and M. Berenguel. “Multivariable control of nighttime temperature and humidity in green-houses combining heating and dehumidification.” IFAC-PapersOnLine, 56:2, pp. 9900–9905, 22nd IFAC World Congress, 2023.
T. Hägglund. Process Control in Practice. De Gruyter Textbook. De Gruyter, Germany, August 2023.
T. Hägglund, S Shinde, A Theorin, and U Thomsen: “An industrial control loop decoupler for process control applications.” Control Engineering Practice, 123:June, 2022.
José Luis Guzmán, Tore Hägglund: "Tuning rules for feedforward control from measurable load disturbances: A review". International Journal of Control, 2021.
García-Mañas, F., Guzmán, J. L., Rodríguez, F., Berenguel, M. & Hägglund, T., "Experimental evaluation of feedforward tuning rules". Control Engineering Practice. 114, 104877, 2021.
T. Hägglund. “A feedforward approach to mid-ranging control.” Control Engineering Practice, 108:March 104713, pp. 1–10, 2021.
M. Leal, A. Hoyo, J. Guzmán, and T. Hägglund. “Double back-calculation approach to deal with input saturation in cascade control problems.” In Portuguese Conference on Automatic Control,Bragança, Portugal, 2020.
Antonio Visioli, Tore Hägglund: "Minimum-time feedforward control in ratio control systems". IFAC World Congress, Berlin, 2020.
Rodríguez, C., Aranda-Escolástico, E., Guzmán, J. L., Berenguel, M. & Hägglund, T: "Revisiting the simplified IMC tuning rules for low-order controllers: Feedforward controller. IET Control Theory and Applications. 14, 12, p. 1612-1618, 2020.
Rodríguez, C., Aranda-Escolástico, E., Guzmán, J. L., Berenguel, M. & Hägglund, T: "Revisiting the simplified IMC tuning rules for low-order controllers: Novel 2DoF feedback controller. IET Control Theory and Applications. 14, 13, p. 1700-1710, 2020.
Antonio Visioli, Tore Hägglund: "Inversion-based feedforward actions in ratio control systems". American Control Conference 2019. Philadelphia, USA.
Tore Hägglund: "Praktisk Processreglering" (Process control in practice). Studentlitteratur 2019. ISBN 978-91-44-13066-8.
Ángeles Hoyo, José Carlos Moreno, José Luis Guzmán, Tore Hägglund: "Robust QFT-based PID controller for a feedforward control scheme". IFAC-PapersOnLine, pp. 262–267, 2018.
Tore Hägglund, José Luis Guzmán: "Development of basic process control structures". IFAC-PapersOnLine, 51:4, pp. 775–780, 2018.
Max Veronesi, Josè Luis Guzman, Antonio Visioli, Tore Hägglund: "Closed-loop tuning rules for feedforward compensator gains". IFAC-PapersOnLine, 50:1, pp. 7523–7528, 2017.
Tore Hägglund: "The Tracking Ratio Station". Control Engineering Practice, 69, pp. 122–130, 2017.
José Luis Guzmán, Tore Hägglund, Max Veronesi, Antonio Visioli: "Performance indices for feedforward control". Journal of Process Control, 26, pp. 26–34, 2015.
Martin Hast, Tore Hägglund: "Low-order feedforward controllers: Optimal performance and practical considerations". Journal of Process Control, 24:9, pp. 1462–1471, 2014.
Carlos Rodríguez, José Luis Guzmán, Manuel Berenguel, Tore Hägglund: "Optimal feedforward compensators for systems with right-half plane zeros". Journal of Process Control, 24:4, pp. 368–374, 2014.
Tore Hägglund: "A Unified Discussion on Signal Filtering in PID Control". Control Engineering Practice, 21:8, pp. 994–1006, 2013.
José Luis Guzmán, Tore Hägglund, Antonio Visioli: "Feedforward compensation for PID control loops". 2012.
Tore Hägglund: "Signal Filtering in PID Control". In IFAC Conference on Advances in PID Control, Brescia, Italy, March 2012.
Martin Hast, Tore Hägglund: "Design of Optimal Low-Order Feedforward Controllers for Disturbance Rejection". In 17th Nordic Process Control Workshop, 2012, Kgs Lyngby, Denmark, January 2012.
Martin Hast, Tore Hägglund: "Design of Optimal Low-Order Feedforward Controllers". In IFAC Conference on Advances in PID Control, Brescia, Italy, March 2012.
Juan Garrido, Francisco Vázquez, Fernando Morilla, Tore Hägglund: "Practical advantages of inverted decoupling". Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control, 225:7, pp. 977–992, 2011.
José Luis Guzmán, Tore Hägglund: "Simple tuning rules for feedforward compensators". Journal of Process Control, 21:1, pp. 92–102, 2011.
Pontus Nordfeldt, Tore Hägglund: "Decoupler and PID controller design of TITO systems". Journal of Process Control, 16:9, pp. 923–936, 2006.
Pontus Nordfeldt: "PID control of TITO systems". Licentiate Thesis Department of Automatic Control, Lund University, Sweden, March 2005.
Pontus Nordfeldt, Tore Hägglund: "Design of PID controllers for decoupled multi-variable systems". 2005.