Topics in Motion Planning and Control for Underactuated Mechanical Systems
 Lund-Trondheim-Chemnitz Summer School on Robotics
Lund-Trondheim-Chemnitz Summer School on Robotics
Time Schedule:
August 5-9, 2019
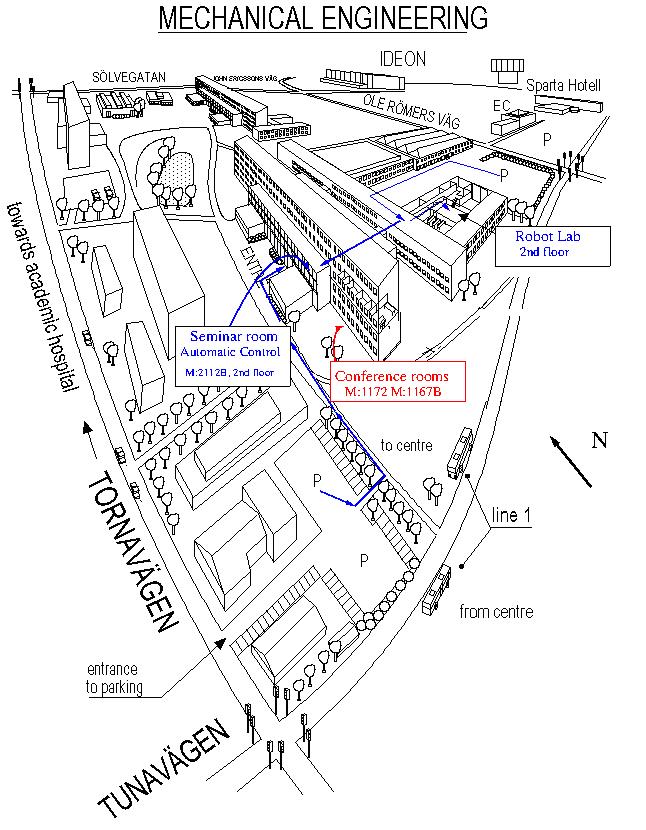
Location:
M:2112B (Seminar room), Department of Automatic Control, Lund University, Sweden (travel info)
Organizers:
Prof. Anton Shiriaev, NTNU
Prof. Anders Robertsson, RobotLab, LTH/LU,
Prof. Dr.-Ing. Ulrike Thomas, Robotics and Human Machine Interaction, TU Chemnitz
Keywords: Dynamic constraints, mechanical systems with passive degrees of freedom, trajectory planning for constrained systems, moving Poincare sections, Poincare and Zhukovski stability, transverse dynamics, transverse linearization, hybrid transverse linearization, non-prehensile manipulation
Course Summary:
The course helps students systematically explore topics of modern robotics and nonlinear control theory focused on developing scalable methods for performing and analyzing agile movements of dynamically constrained robotic systems. Modeling, motion planning and control algorithms for such systems become important and unavoidable, for instance, in describing problem settings for automating various labor-intensive tasks such as grasping, manipulating or handling of external objects performed nowadays in industry and service applications primarily by humans. Most of dynamic constraints in applications are case specific or linked to scenarios of work of mechanisms. Meanwhile, some constraints are generic and can be simultaneously present in describing behaviors of quite distant nonlinear systems. Constraints due to under-actuation provide examples of such generic structural features of nonlinear mechanical systems.
The first part of lectures emphasize challenges and approaches to handle and overcome dynamic constraints. The second part of the course includes lectures devoted to illustrating theoretical arguments, and to practicing on available software and hardware realization of the method developed for solving trajectory planning and control assignments for performing non-prehensile manipulation of a passive disc on a hand of a Butterfly robot.
The idea of the robot and the problem to be solved can be devised from the movies:
- Brian Douglas movie: "Humans, Robots, and Non-Prehensile Manipulation"
- Maksim Surov movie: "Nonprehensile Manipulation - the Butterfly robot"
Syllabus of the lectures can be found here.
Literature for additional reading can be found here.
Participation: Please send mail to Anders Robertsson (subject: Robotics Summer School 2019)
Preliminary Schedule:
- Monday, August 5: 10.30-12.00 Lectures [UT] pdf-slides p. 1-60
- Monday, August 5: 13.30-15.15 Lecture [UT] pdf-slides p. 61-99
- Monday, August 5: 15.45-17.30 Exercises [SK] problem-set (pdf) matlab-scripts (zip)
- Social event, August 5: 19.00--
- Tuesday, August 6: 9.15-12.00 Lectures
- Tuesday, August 6: 13.15-17.00 Exercises
- Wednesday, August 7: 9.15-12.00 Lecture
- Wednesday, August 7: 13.15-17.00 Lectures/Exercises
- Social event
- Thursday, August 8: 9.15-12.00 Lecture
- Thursday, August 8: 13.15-17.00 Exercises+ Lab
- Social event
- Friday, August 9: 9.15-12.00 Lecture
- Friday, August 9: 13.15-15.00 Exercises
Lecture slides and homework assignments will be available for the participants


{kind=link}