PID Control
Researchers: Karl Johan Åström, Tore Hägglund, and Kristian Soltesz.
This project has been in progress since the beginning of the eighties and resulted in industrial products as well as several PhD theses. Three monographs on PID control that are based on experiences obtained in the project have also been published. The last is "Advanced PID Control", published in 2005. It is also translated to Spanish 2009: "Control PID avanzado". The research is currently focused on the following topics:
Automatic Tuning of PID Controllers
The PID controller is used almost everywhere in industry, but a lot of PID controllers work poorly due to bad tuning. To be able to automatically tune PID controllers is a useful feature that has been around since the beginning of the 80's. A lot has happened since then both regarding PID knowledge, but mainly in available computing power, and we are now developing new autotuners that can take advantage of that. More information about our current autotuner research is found on the page for Automatic Tuning.
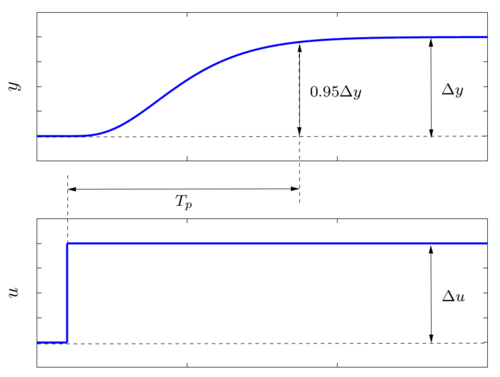
The One-Third Rule for PI Controller Tuning
Despite academic advances in PID controller design and development of automatic tuning procedures, there are still many PID controllers that are badly tuned, or not even tuned at all, in process industry. There are several reasons for this, but one major reason is that it is considered too time consuming to use current PID controller tuning methods. This project presents a new tuning method that is significantly simpler and faster to use compared to the methods that form the current industry standard, but still gives tuning parameters that are fairly close to those obtained by the more advanced methods.
A brief summary of the method is:
Make an open-loop step response experiment and set the integral time to one third of the time it takes for the process value to settle, and set the controller gain to one third of the ratio between the changes in control signal and process value, respectively.
Optimal Robust PID design
A Matlab-based software tool for optimal PID design has been developed at the department. The software finds the PI or PID controller that minimizes the Integrated Absolute Error (IAE) value during a step load disturbance on the process input, with respect to robustness constraints on the sensitivity and complementary sensitivity functions. This PID design method is called SoftWare-based Optimal Robust Design (SWORD).
Varying the time constant of the low-pass filter, it is possible to find optimal or near-optimal solutions to an optimization problem extended with a noise sensitivity constraint. As the time constant of the low-pass filter increases, the PID controller will gradually transform into a PI controller and then finally an I controller. This gives a natural set of I, PI and PID controllers to choose from. The final controller can be selected based on visual feedback of the control signal activity due to measurement noise.
<caption> </caption>
Download the latest SWORD PID Design Tool version for Matlab
Download the previous PID Design Tool version for Matlab
PID design by convex optimization
Convex optimization has grown to become a mature and powerful tool in a vast number of research fields. Design of PID controllers subject to robustness constraint is not a convex optimization problem, however, it fits well into the framework of the convex-concave procedure. Using that procedure, tuning algorithms for both SISO and MIMO PID controllers have been developed. Although globally optimal controllers cannot be guaranteed, the method produces robust controllers with good performance. The work is done in collaboration with Stephen Boyd, Stanford University.
Optimization-Based Robust PID Design in Matlab
Compact and relatively efficient implementations of software for solving the PID design problems introduced above under Optimal Robust PID Design and PID design by convex optimization are available through the Matlab code PIDopt. The software also allows for co-design of PID controllers and measurement filters.
Download latest version of PIDopt for Matlab
Or clone directly from git@gitlab.control.lth.se:kristian/PIDopt.git.
Interactive learning modules for PID control
We are also developing interactive learning modules for PID control. The modules are designed to speed up learning and to enhance understanding of the behavior of loops with PID controllers. The modules are implemented in SysQuake, and the work is done in collaboration with professor Sebastián Dormido at UNED, Madrid, and José Luis Guzmán at Universidad de Almería.
The tools can be downloaded from Universidad de Almería.
Publications
T. Hägglund, S Shinde, A Theorin, and U Thomsen: “An industrial control loop decoupler for process control applications.” Control Engineering Practice, 123:June, 2022.
José Luis Guzmán, Tore Hägglund: "Tuning rules for feedforward control from measurable load disturbances: A review". International Journal of Control, 2021.
García-Mañas, F., Guzmán, J. L., Rodríguez, F., Berenguel, M. & Hägglund, T., "Experimental evaluation of feedforward tuning rules". Control Engineering Practice. 114, 104877, 2021.
Lundh, M., Theorin, A., Hägglund, T., Hansson, J., Svensson, M., Åström, K. J. & Soltesz, K., "Model optimization for autotuners in industrial control systems". Proceedings of the 26th International Conference on Emerging Technologies and Factory Automation (ETFA). 2021.
Hansson, J., Svensson, M., Theorin, A., Tegling, E., Soltesz, K., Hägglund, T. & Åström, K. J., "Next generation relay autotuners - analysis and implementation". Proceedings of the 5th IEEE Conference on Control Technologies and Applications (CCTA), 2021.
T. Hägglund. “A feedforward approach to mid-ranging control.” Control Engineering Practice, 108:March 104713, pp. 1–10, 2021.
M. Leal, A. Hoyo, J. Guzmán, and T. Hägglund. “Double back-calculation approach to deal with input saturation in cascade control problems.” In Portuguese Conference on Automatic Control,Bragança, Portugal, 2020.
Antonio Visioli, Tore Hägglund: "Minimum-time feedforward control in ratio control systems". IFAC World Congress, Berlin, 2020.
Rodríguez, C., Aranda-Escolástico, E., Guzmán, J. L., Berenguel, M. & Hägglund, T: "Revisiting the simplified IMC tuning rules for low-order controllers: Feedforward controller. IET Control Theory and Applications. 14, 12, p. 1612-1618, 2020.
Rodríguez, C., Aranda-Escolástico, E., Guzmán, J. L., Berenguel, M. & Hägglund, T: "Revisiting the simplified IMC tuning rules for low-order controllers: Novel 2DoF feedback controller. IET Control Theory and Applications. 14, 13, p. 1700-1710, 2020.
Antonio Visioli, Tore Hägglund :"Inversion-based feedforward actions in ratio control systems". American Control Conference 2019. Philadelphia, USA.
Tore Hägglund: "The One-Third Rule for PI controller tuning". Computers and Chemical Engineering. 127. pp. 25-30, 2019.
Tore Hägglund: "Praktisk Processreglering" (Process Control in Practice). Studentlitteratur 2019. ISBN 978-91-44-13066-8.
Josefin Berner, Kristian Soltesz, Tore Hägglund, Karl Johan Åström: "An experimental comparison of PID autotuners". Control Engineering Practice, 73, pp. 124–133, 2018.
Ángeles Hoyo, José Carlos Moreno, José Luis Guzmán, Tore Hägglund: "Robust QFT-based PID controller for a feedforward control scheme". IFAC-PapersOnLine, pp. 262–267, 2018.
Tore Hägglund, José Luis Guzmán: "Development of basic process control structures". IFAC-PapersOnLine, 51:4, pp. 775–780, 2018.
Max Veronesi, Josè Luis Guzman, Antonio Visioli, Tore Hägglund: "Closed-loop tuning rules for feedforward compensator gains". IFAC-PapersOnLine, 50:1, pp. 7523–7528, 2017.
Tore Hägglund: "The Tracking Ratio Station". Control Engineering Practice, 69, pp. 122–130, 2017.
Josefin Berner:Automatic Controller Tuning using Relay-based Model Identification. PhD Thesis Department of Automatic Control, Lund University, Sweden, October 2017.
Pedro Mercader, Kristian Soltesz, Alfonso Baños: "Robust PID Design by Chance-Constrained Optimization". Journal of the Franklin Institute, 354:18, pp. 8217–8231, 2017.
Josefin Berner, Kristian Soltesz: "Short and Robust Experiments in Relay Autotuners". In 22nd IEEE International Conference on Emerging Technologies and Factory Automation; ETFA2017, 2017.
Josefin Berner, Kristian Soltesz, Karl Johan Åström, Tore Hägglund: "Practical Evaluation of a Novel Multivariable Relay Autotuner with Short and Efficient Excitation". In IEEE Conference on Control Technology and Applications, CCTA 2017, 2017.
Josefin Berner, Kristian Soltesz, Tore Hägglund, Karl Johan Åström: "Autotuner identification of TITO systems using a single relay feedback experiment". IFAC-PapersOnLine, 50:1, pp. 6619–6623, 2017.
Kristian Soltesz, Pedro Mercader, Alfonso Baños: "An automatic tuner with short experiment and probabilistic plant parameterization". Int. Journal of Robust and Nonlinear Control, 27:11, pp. 1857–1873, 2017.
Kristian Soltesz, Chriss Grimholt, Sigurd Skogestad: "Simultaneous design of proportional–integral–derivative controller and measurement filter by optimisation". IET Control Theory and Applications, 11:3, pp. 341–348, 2016.
Pedro Mercader, Kristian Soltesz, Alfonso Baños: "Autotuning of an In-Line pH Control System". In 21st IEEE International Conference on Emerging Technologies and Factory Automation, ETFA 2016, 2016.
Josefin Berner, Tore Hägglund, Karl Johan Åström: "Asymmetric relay autotuning - Practical features for industrial use". Control Engineering Practice, 54, pp. 231–245, 2016.
Josefin Berner, Tore Hägglund, Karl Johan Åström: "Improved Relay Autotuning using Normalized Time Delay". In American Control Conference, 2016, 2016.
Tore Hägglund: "Autotuning". In: Encyclopedia of Systems and Control, Springer, 2015.
Alfred Theorin, Tore Hägglund: "Derivative backoff: The other saturation problem for PID controllers". Journal of Process Control, 33, pp. 155–160, 2015.
Alfred Theorin, Josefin Berner: "Implementation of an Asymmetric Relay Autotuner in a Sequential Control Language". In IEEE International Conference on Automation Science and Engineering (IEEE CASE 2015), 2015.
Olof Garpinger: "Optimal PI and PID Parameters for a Batch of Benchmark Process Models Representative for the Process Industry". Technical Report Department of Automatic Control, Lund University, Sweden, August 2015.
Stephen Boyd, Martin Hast, Karl Johan Åström: "MIMO PID Tuning via Iterated LMI Restriction". International Journal of Robust and Nonlinear Control, 26:8, pp. 1718–1731, 2015.
Martin Hast, Tore Hägglund: "Optimal proportional–integral–derivative set-point weighting and tuning rules for proportional set-point weights". IET Control Theory & Applications, 9:15, pp. 2266–2272, 2015.
Josefin Berner: "Automatic Tuning of PID Controllers based on Asymmetric Relay Feedback". Licentiate Thesis Department of Automatic Control, Lund University, Sweden, June 2015.
José Luis Guzmán, Tore Hägglund, Max Veronesi, Antonio Visioli: "Performance indices for feedforward control". Journal of Process Control, 26, pp. 26–34, 2015.
José Luis Guzmán, Tore Hägglund, Karl Johan Åström, Sebastián Dormido, Manolo Berenguel, Yves Piquet: "Understanding PID design through interactive tools". In 19th IFAC World Congress, 2014, 2014.
Vanessa Romero Segovia, Tore Hägglund, Karl Johan Åström: "Design of measurement noise filters for PID control". In 19th IFAC World Congress, 2014, 2014.
Vanessa Romero Segovia, Tore Hägglund, Karl Johan Åström: "Measurement noise filtering for common PID tuning rules". Control Engineering Practice, 32, pp. 43–63, 2014.
Olof Garpinger, Tore Hägglund, Karl Johan Åström: "Performance and robustness trade-offs in PID control". Journal of Process Control, 24:5, pp. 568–577, 2014.
Vanessa Romero Segovia, Tore Hägglund, Karl Johan Åström: "Measurement noise filtering for PID controllers". Journal of Process Control, 24:4, pp. 299–313, 2014.
Carlos Rodríguez, José Luis Guzmán, Manuel Berenguel, Tore Hägglund: "Optimal feedforward compensators for systems with right-half plane zeros". Journal of Process Control, 24:4, pp. 368–374, 2014.
Josefin Berner, Karl Johan Åström, Tore Hägglund: "Towards a New Generation of Relay Autotuners". In 19th IFAC World Congress, 2014, 2014.
Martin Hast, Karl Johan Åström, Bo Bernhardsson, Stephen P. Boyd: "PID Design by Convex-Concave Optimization". In European Control Conference, 2013, 2013.
C. Rodríguez, José Luis Guzmán, Manuel Berenguel, Tore Hägglund, J. E. Normey-Rico: "Diseño de controladores por Adelanto para Inversión de Retardo no realizable". In XXXIV Jornadas de Automática, 2013.
C. Rodríguez, Josè Luis Guzman, Manuel Berenguel, Tore Hägglund: "Generalized feedforward tuning rules for non-realizable delay inversion". Journal of Process Control, 23:9, pp. 1241–1250, 2013.
Tore Hägglund: "A Unified Discussion on Signal Filtering in PID Control". Control Engineering Practice, 21:8, pp. 994–1006, 2013.
José Luis Guzmán, Tore Hägglund, Antonio Visioli: "Feedforward compensation for PID control loops". In Ramon Vilanova, Antonio Visioli (Eds.): PID control in the third millenium, Springer, 2012.
Olof Garpinger, Tore Hägglund, Lars Cederqvist: "Software for PID design: benefits and pitfalls". In IFAC Conference on Advances in PID Control, 2012.
Olof Garpinger, Tore Hägglund, Karl Johan Åström: "Criteria and Trade-offs in PID Design". In IFAC Conference on Advances in PID Control, 2012.
Tore Hägglund: "Signal Filtering in PID Control". In IFAC Conference on Advances in PID Control, 2012.
Martin Hast, Tore Hägglund: "Design of Optimal Low-Order Feedforward Controllers for Disturbance Rejection". In 17th Nordic Process Control Workshop, 2012, 2012.
Martin Hast, Tore Hägglund: "Design of Optimal Low-Order Feedforward Controllers". In IFAC Conference on Advances in PID Control, 2012.
Per-Ola Larsson, Tore Hägglund: "Comparison Between Robust PID and Predictive PI Controllers with Constrained Control Signal Noise Sensitivity". In IFAC Conference on Advances in PID Control, 2012.
Kristian Soltesz: "On Automation of the PID Tuning Procedure". Licentiate Thesis Department of Automatic Control, Lund University, Sweden, January 2012.
Lars Cederqvist, Olof Garpinger, Tore Hägglund, Anders Robertsson: "Cascade control of the friction stir welding process to seal canisters for spent nuclear fuel". Control Engineering Practice, 20:1, pp. 35–48, 2012.
Juan Garrido, Francisco Vázquez, Fernando Morilla, Tore Hägglund: "Practical advantages of inverted decoupling". Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control, 225:7, pp. 977–992, 2011.
José Luis Guzmán, Tore Hägglund, Karl Johan Åström, Sebastián Dormido, Manuel Berenguel, Yves Piguet: "Feedforward Control Concepts through Interactive Tools". In 18th IFAC World Congress, 2011, 2011.
Per-Ola Larsson, Tore Hägglund: "Control Signal Constraints and Filter Order Selection for PI and PID Controllers". In American Control Conference, 2011 , 2011.
Per-Ola Larsson:Optimization of Low-Level Controllers and High-Level Polymer Grade Changes. PhD Thesis TFRT-1088, Department of Automatic Control, Lund University, Sweden, October 2011.
Tore Hägglund: "A shape-analysis approach for diagnosis of stiction in control valves". Control Engineering Practice, 19:8, pp. 782–789, 2011.
José Luis Guzmán, Tore Hägglund: "Simple tuning rules for feedforward compensators". Journal of Process Control, 21:1, pp. 92–102, 2011.
Per-Ola Larsson, Tore Hägglund: "Robustness Margins Separating Process Dynamics Uncertainties". In European Control Conference, 2009 , 2009.
Per-Ola Larsson, Tore Hägglund: "Relations Between Control Signal Properties and Robustness Measures". In 17th IFAC World Congress, 2008, 2008.