Event-Based Control and Estimation with Application to Server Systems
Researchers: Marcus Thelander Andrén, Johan Ruuskanen, Anton Cervin, Bo Bernhardsson, Kristian Soltesz
Funding: Swedish Research Council, WASP
Duration: 2015–
With the current strong trend towards networked and autonomous systems, it becomes less realistic to demand that all elements of a control loop should operate in a synchronous, time-triggered fashion. Above the lowest level of feedback control, it is often more natural and efficient to communicate, decide, and act based on events. Previous work show that event-triggered control can achieve both lower average sampling rates and better performance than standard, periodic control. There is however not yet a coherent theory for analysis and synthesis of event-based controllers.
This project tackles both theoretical and practical problems related to event-based control and estimation. For linear reset systems, we study how events should optimally be generated and analyze the resulting trade-off between performance and event rates. We use particle filters and other nonlinear estimation methods to estimate states and parameters in event-based systems. As an application, we study server and cloud systems, both in simulations and in test-beds. Such systems are inherently event-driven as incoming connections and their responses occur as spontaneous events. The results can help to optimize resource usage (CPU, network, power consumption) in embedded and cloud systems.
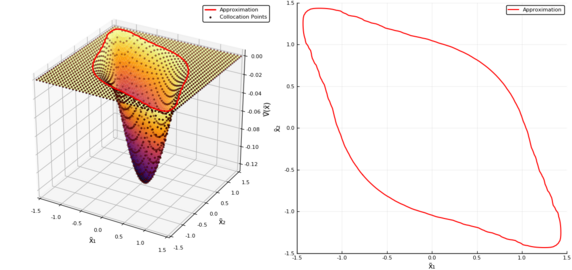
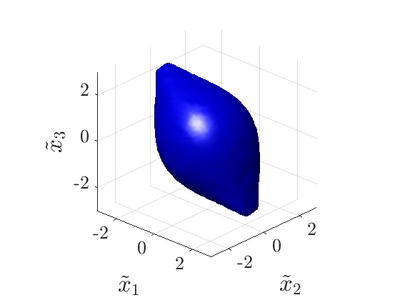
During 2018 we have developed a numerical algorithm for solving a class of free boundary partial differential equations, whose solutions are key when designing optimal event-based sampling policies (see figures below). We have also developed an extension of the Auxilary Particle Filter for systems with event-based measurements. Finally, we have begun an investigation on how to optimally implement event-based PID-controllers.